Примеры на Си для микроконтроллеров Atmel AVR. Подключение кнопки - Программирование в CV AVR? Опыты с кнопками на avr
Иногда приходится делать очень маленькое устройство, например, велокомпьютер. Или конструктив не позволяет разместить много кнопок. В общем есть у нас одна кнопка на ввод и ничего более.
Спартанские условия, но и тут можно развернуть мощный функционал, многоуровневые меню и прочие прелести жизни. сейчас я покажу одну из реализаций такого управления.
Итак, что у умеет наша кнопка?
- Ее можно нажимать кратко
- Можно жать длинно
- Можно делать разные комбинации нажатий
- Ее можно отпускать в нужный момент
Не густо, но вполне ничего. Для одной кнопки то. Главный затык при написании этого не просрать массу системных ресурсов (время процессора, таймеры и тыды) на обработку этой несчастной кнопки. Ведь нам придется отслеживать факт нажатия, факт отжатия, время нажатия, число нажатий с разным временем. Я видел такие адовые реализации этого интерфейса, что просто диву давался как можно нагородить столько тупняков и тормозов в этой одной сосне, да еще потратить все таймеры:)
Так что ТЗ выставим следующее:
- Никаких аппаратных таймеров, кроме таймера диспетчера.
- Никаких временных задержек, только вызов себя же по таймеру.
- Никаких ожиданий нажатия-отжатия в цикле. Зашли, проверили — отдали управление.
- Введем временной интервал mode_time, в течении которого будем отслеживать комбинацию нажатий. Скажем 2с
- На выходе будем иметь число коротких и длинных нажатий за данный интервал
Алгоритм
Сделаем все на конечном автомате. У него будут три состояния:
- Up — кнопка не нажата
- Dn — кнопка нажата
- Al — кнопка отпущена после длительного нажатия
А также будет одна служебная процедура, которая спустя mode_time (2c) после первого экшна с кнопкой сгребет все результаты и что-нибудь с ними сделает. Что — это уже не важно. От программы зависит.
И вся эта дребедень будет крутиться в цикле, вызывая сама себя через диспетчер (или каким еще образом) раз в 20мс.
Up
Входим.
Смотрим не нажата ли кнопка? Если нет — выходим. Если нажата, то переводим автомат в положение Dn
Проверяем первый ли раз за интервал мы тут? Если первый, то поставим нашу служебную процедуру на отложенный запуск (через 2с), взведем флаг, что процесс пошел.
Выходим.
Dn
Входим.
Еще нажата? Если нет, значит кнопка уже отпущена, скидываемся в состояние в Up и засчитываем одно короткое нажатие, увеличивая счетчик коротких нажатий cnt_s
. Если еще нажата, то щелкаем счетчиком времени замера длительности нажатия Timе. Замер длительности у нас идет в итерациях автомата. Одна итерация 20мс. В лимит длинного нажатия я заложил 20 итераций, что дает около 400мс. Все что больше 0.4с считаем длинным нажатием. Как натикает больше 20 итераций, то засчитываем одно длинное нажатие и перекидываем автомат в состояние Al. Выходим.
Al
Входим.
Еще не отпустили? Если нет, то выходим. Если кнопка отпущена, то перебрасываемся в Up, скинув переменную Time.

За время mode_time, за те две секунды, сколько успеем натыкать — все наше. Запустится процедура анализа собранных данных и разгребет натыканное. Там уже все просто. Банальным case’ом делаем нужный нам экшн. Я вот, например, флажки выставляю которые перехватывает другая задача. Главное не блокировать эту задачу ничем тяжелым, чтобы не прозевать следующую комбинацию.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 | #include |
#include
Код написан так, что на AVR там завязана буквально пара строчек. По крайней мере в коде обработчика нажатий кнопки. Все привязки на железо идут в хидере, да и их там всего ничего:
| 1 2 3 4 5 6 7 8 9 10 11 | #include |
#include Так что портировать это на другую архитектуру дело смены двух строчек. Ну и, возможно, вам потребуется изменить механизм автозапуска и запуска функции обработчика. Если вы будете использовать какой то свой диспетчер, ОС или еще какую систему организации прошивки. Но это две строчки в коде поправить. Все описанное в статье мясо лежит в двух файлах button.c
и button.h
Видео работы
Дребезг
Варианты
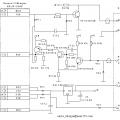
Ну и, разумеется, этот же конечный автомат можно поставить на разбор чего угодно. Например на отслеживание какого-либо другого флажка, от матричной клавиатуры или какого сигнального устройства. Задача: Разработаем программу управления одним светодиодом. При нажатии на кнопку светодиод горит, при отпускании гаснет. Для начала разработаем принципиальную схему устройства. Для подключения к микроконтроллеру любых внешних устройств используются порты ввода-вывода. Каждый из портов способен работать как на вход так и на выход. Подключим светодиод к одному из портов, а кнопку к другому. Для этого опыта мы будем использовать контроллер Atmega8
. Эта микросхема содержит 3 порта ввода-вывода, имеет 2 восьмиразрядных и 1 шестнадцатиразрядный таймер/счетчик. Также на борту имеется 3-х канальный ШИМ, 6-ти канальный 10-ти битный аналого-цифровой преобразователь и многое другое. По моему мнению микроконтроллер прекрасно подходит для изучения основ программирования. Для подключения светодиода мы будем использовать линию PB0, а для считывания информации с кнопки воспользуемся линией PD0. Схема приведена на рис.1. Рис. 1
Через резистор R2 на вход PD0 подается плюс напряжения питания, что соответствует сигналу логической единице. При замыкании кнопки напряжение падает до нуля, что соответствует логическому нулю. В дальнейшем R2 можно исключить из схемы, заменяя его на внутренний нагрузочный резистор, введя необходимые настройки в программе. Светодиод подключен к выходу порта PB0 через токоограничивающий резистор R3. Для того чтобы зажечь светодиод надо подать в линию PB0 сигнал логической единицы. Задающий тактовый генератор будем использовать внутренний на 4MHz, так как в устройстве нет высоких требований к стабильности частоты. Теперь пишем программу. Для написания программ я использую программную среду AVR Studio
и WinAvr.
Открываем AVR Studio, всплывает окошко приветствия, нажимаем кнопку "Создать новый проект" (New project), далее выбираем тип проекта - AVR GCC, пишем имя проекта например "cod1", ставим обе галочки "Создать папку проекта" и "Создать файл инициализации", нажимаем кнопку "Далее", в левом окошке выбираем "AVR Simulator", а в правом тип микроконтроллера "Atmega8", нажимаем кнопку "Финиш", открывается редактор и дерево категорий проекта - начальные установки закончены. Для начала добавим стандартный текст описаний для Atmega8 с помощью оператора присоединения внешних файлов: #include
синтаксис директивы #include
#include <имя_файла.h> Угловые скобки < и > указывают компилятору, что подключаемые файлы нужно сначала искать в стандартной папке WinAvr с именем include. Двойные кавычки “ и “ указывают компилятору начинать поиск с директории, в которой хранится проект. Для каждого типа микроконтроллера есть свой заголовочный файл. Для ATMega8 этот файл называется iom8.h, для ATtiny2313 - iotn2313.h. В начале каждой программы мы должны подключать заголовочный файл того микроконтроллера, который мы используем. Но есть и общий заголовочный файл io.h. Препроцессор обрабатывает этот файл и в зависимости от настроек проекта включает в нашу программу нужный заголовочный файл. Для нас первая строчка программы будет выглядеть вот так: #include Любая программа на языке Си должна обязательно содержать одну главную функцию. Она имеет имя main. Выполнение программы всегда начинается с выполнения функции main. У функции есть заголовок - int main(void) и тело - оно ограниченно фигурными скобками {}. int
main(void) В тело функции мы и будем добавлять наш код. Перед именем функции указывается тип возвращаемого значения. Если функция не возвращает значение - используется ключевое void
. int
- это целое 2-х байтное число, диапазон значений от - 32768 до 32767 После имени функции в скобках () указываются параметры, которые передаются функции при ее вызове. Если функция без параметров - используется ключевое слово void
. Функция main
содержит в себе набор команд, настройки системы и главный цикл программы. Далее настраиваем порт D
на вход. Режим работы порта определяется содержимым регистра DDRD
(регистр направления передачи информации). Записываем в этот регистр число "0x00" (0b0000000 - в двоичном виде), кроме кнопки к этому порту ничего не подключено, поэтому настраиваем весь порт D на вход. Настроить порт поразрядно можно записав в каждый бит регистра числа 0 или 1 (0-вход, 1-выход), например DDRD = 0x81 (0b10000001) - первая и последняя линия порта D работают на выход, остальные на вход. Необходимо также подключить внутренний нагрузочный резистор. Включением и отключением внутренних резисторов управляет регистр PORTx, если порт находится в режиме ввода. Запишем туда единицы. Настраиваем порт B
на выход. Режим работы порта определяется содержимым регистра DDRB
. Ничего кроме светодиода к порту B
не подключено, поэтому можно весь порт настроить на выход. Это делается записью в регистр DDRB
числа "0xFF". Для того чтобы при первом включении светодиод не загорелся запишем в порт B
логические нули. Это делается записью PORTB
= 0x00; Для присвоения значений используется символ "=" и называется оператором присваивания, нельзя путать со знаком "равно" Настройка портов будет выглядеть так: DDRD = 0x00; Пишем основной цикл программы. while
("пока" с англ.) - эта команда организует цикл, многократно повторяя тело цикла до тех пор пока выполняется условие, т. е пока выражение в скобках является истинным. В языке Си принято считать, что выражение истинно, если оно не равно нулю, и ложно, если равно. Команда выглядит следующим образом: while
(условие) В нашем случае основной цикл будет состоять лишь из одной команды. Эта команда присваивает регистру PORTB
инвертируемое значение регистра PORTD
. PORTB = ~PIND; //взять значение из порта D, проинвертировать его и присвоить PORTB (записать в PORTB)
// выражения на языке Си читаются справа налево
PIND
регистр ввода информации. Для того, чтобы прочитать информацию с внешнего вывода контроллера, нужно сначала перевести нужный разряд порта в режим ввода. То есть записать в соответствующий бит регистра DDRx
ноль. Только после этого на данный вывод можно подавать цифровой сигнал с внешнего устройства. Далее микроконтроллер прочитает байт из регистра PINx
. Содержимое соответствующего бита соответствует сигналу на внешнем выводе порта. Наша программа готова и выглядит так:
#include В языке Си широко используются комментарии. Есть два способа написания. /*Комментарий*/ При этом компилятор не будет обращать внимание на то что написано в комментарии. Если используя эту же программу и подключить к микроконтроллеру 8 кнопок и 8 светодиодов, как показано на рисунке 2, то будет понятно что каждый бит порта D
соответствует своему биту порта B
. Нажимая кнопку SB1 - загорается HL1, нажимая кнопку SB2 - загорается HL2 и т.д. Рисунок 2
В статье были использованы материалы из книги Белова А.В. "Самоучитель разработчика устройств на AVR" Почти ни одно изделие с микроконтроллером не обходится без кнопок. Тема эта уже избитая и во многом известная. Написанием этой статьи я не пытаюсь изобрести велосипед. Просто решил собрать всю инфу по схемотехнике воедино. Думаю, что материал будет полезен начинающим.Чтобы не сбивать вас с толку, на приведенных ниже рисунках не показаны схемы питания, сброса и тактирования микроконтроллеров. рис1а рис1б Если кнопок немного и дефицита выводов мк не наблюдается, используем традиционный способ подключения. Когда кнопка отпущена – вывод мк через резистор соединен с “плюсом” питания (рис. 1а). Когда кнопка нажата – вывод мк соединен с землей. Подтягивающий резистор R1 ограничивает силу тока в цепи переключателя. Если бы его не было, то при нажатии кнопки мы бы просто закоротили наш источник питания. В большинстве современных микроконтроллеров есть встроенные подтягивающие резисторы, поэтому внешние можно не ставить (рис1б). В программе микроконтроллера нужно будет настроить используемый вывод на вход и включить внутренний подтягивающий резистор.
Что произойдет, если вывод микроконтроллера окажется в режиме выхода? Это будет зависеть от состояния этого вывода. Если на выводе “логический ноль” – ничего страшного не случиться, потому что - в первом случае (рис1а) величина втекающего тока ограничена резистором R1, а во втором случае (рис1б) никакой ток вообще не потечет. При нажатии кнопки тоже ничего не случиться, поскольку разность потенциалов между выводом и “землей” в этом случае будет равна нулю. Если же на выводе будет ”логическая единица” и кнопка окажется нажатой, то через вывод микроконтроллера на землю потечет ток величиной в несколько десятков миллиампер и вывод порта может “погореть”. Предельно допустимый ток для вывода микроконтролера AVR согласно документации равен 40 мА. Поэтому иногда нелишним бывает поставить между выводом мк и кнопкой резистор номиналом в несколько сотен ом, например 330 (рис 1с). Так, например, подключены кнопки на отладочной плате STK500. Это сделано для подстраховки, чтобы пользователь нечаянно не спалил микроконтроллер в ходе своих эксперементов. Для своих макетов впрочем можно обойтись и без этого резистора. Используется когда кнопок больше двух, а выводы мк хочется сэкономить. Каждой кнопке в данном случае соответствует свой цифровой код, а количество кнопок, которые можно таким способом повесить на N выводов мк = 2 N - 1. То есть на три вывода можно повесить 7 кнопок, на четыре – 15 и так далее... но я бы больше 7-ми вешать не стал. Увеличивается количество дополнительных внешних компонентов, усложняется схема и программа мк. Кроме того, для большого количества кнопок есть и другие схемы включения. Подтягивающие резисторы на схеме не показаны, подразумевается, что используются внутренние. Кстати, через диоды еще можно завести сигналы от кнопок на вывод внешнего прерывания контроллера (рис. 3). При нажатии любой кнопки вывод внешнего прерывания через диод будет замыкаться на землю и вызывать прерывание (естественно при условии, что оно настроено и разрешено). Таким образом контроллеру не нужно будет постоянно опрашивать кнопки, эта процедура будет запускаться только по событию внешнего прерывания. Данная схема актуальна не для всех микроконтроллеров AVR, потому что в некоторых моделях микроконтроллеров внешнее прерывание может возникать по любому изменению на любом выводе. (например в ATmega164P) Такой вариант подключения обычно используется для блоков из нескольких кнопок, которые объединены конструктивно и соединены электрически по матричной схеме. Но никто не запрещает использовать эту схему и для включения обычных кнопок, однако реальную экономию она дает при количестве кнопок? 9. Выводы PС0, PС1, PС2, PC3 – это строки матрицы, выводы PB0, PB1, PB2 – это столбцы матрицы. Кнопки можно опрашивать либо по строкам, либо по столбцам. Допустим, мы опрашиваем их по столбцам. Процедура опроса будет выглядеть следующим образом. Начальное состояние всех выводов – вход с включенным подтягивающим резистором. Устанавливаем вывод PB0 в режим выхода и выставляем ноль. Теперь нажатие кнопок S1, S2, S3, S4 будет замыкать выводы PС0, PС1, PС2, PC3 на 0 питания. Опрашиваем эти выводы и определям нажата ли какая-нибудь кнопка в данный момент. Устанавливаем вывод PB0 в режим выхода и включаем подтягивающий резистор. Устанавливаем вывод PB1 в режим выхода и выставляем ноль. Снова опрашиваем выводы PС0, PС1, PС2, PC3. Теперь нажатие кнопок S5, S6, S7, S8 будет замыкать выводы PС0, PС1, PС2, PC3. Последний столбец кнопок опрашиваем аналогично. Строки матрицы можно завести через диоды на вывод внещнего прерывания. Тогда логику программы можно было бы построить так. Если клавиатура не используется в течении нескольких минут, микроконтроллер переходит в режим пониженного энергопотребления. При этом выводы PB0, PB1, PB2 – конфигурируются как выходы с нулевым логическим уровнем. Когда одна из кнопок нажимается, вывод прерывания через диод замыкается на ноль. Это вызывает внешнее прерывание, микроконтроллер просыпается и запускает таймер по сигналам которого происходит сканирование клавиатуры. Параллельно запускается счетчик времени, который сбрасывается при нажатии любой из кнопок. Как только он переполняется, микроконтроллер опять переходит в режим пониженного энергопотребления. Итак мы добрались до неотъемлемой части большинства проектов на микроконтроллерах - до кнопок. Кнопка достаточно простое устройство, имеющее, как правило, всего два состояния, если говорить языком программирования это состояние логической 1 (контакты замкнуты) и логического 0 (контакты разомкнуты). Рассмотрим схему. Имеем все туже схему с семисегментными индикаторами, но добавлены 4 кнопки. При помощи кнопок группы A
будем увеличивать или уменьшать выводимое значение на первых трех индикаторах, а кнопками группы B –
изменять значение на последних двух индикаторах. Для начала кратко о кнопках. Кнопки применим с нормально разомкнутыми контактами без фиксации. Одним контактом подключим к земле, а другим к отдельным выводам микроконтроллера. Подтягивающий к плюсу резистор устанавливать не будем, так как таковой предусмотрен в самом микроконтроллере. Осталось только написать программу для опроса кнопок (состояния выводов микроконтроллера) и вывода результата на индикаторы. В связи с простотой схемы и затруднениями читателей в понимании программы на C,
основной упор в этом разделе направим именно на разбор программы.
Итак программа.
#include Приступим. Программу на C
обычно начинают с подключения внешних библиотек. За это в программе отвечают две строки:
#include avr/io.h
это библиотека ввода/вывода которая объяснит компилятору какие порты ввода/вывода есть у микроконтроллера, как они обозначены и на что они способны. И самое интересное что эта библиотека сама выбирает из настроек проекта для какого микроконтроллера нужно применить описания, то позволяет использовать эту библиотеку для разных микроконтроллеров. Эту библиотеку нужно подключать в первую очередь.
Вторая часто используемая библиотека util/delay.h
помогает создавать задержки в выполнении программы, что достаточно удобно.
#define BUTTON_AP PD4
указывает что на выводе
PD4 (
регистр 4 порта
B)
мы будем подключать кнопку
A+ (
смотрите схему
).
Это нужно для того чтобы если мы вдруг надумаем кнопку переключить на другой вывод то нам не понадобится искать по всей программе, просто изменить в
define
название вывода
PD4
на нужный, при этом в программе так и останется
BUTTON_AP.
Но в случае с выводами для
SPI
ничего изменить не получится потому что поддержка
SPI
аппаратная и жестко привязана к выводам микроконтроллера производителем.
Следующая интересная часть программы это описание портов.
DDRB |= (1< Так были переключены на вывод перечисленные разряды порта
B
(по умолчанию все разряды всех портов настроены на ввод)
.
Э
ту строку можно записать следующим образом без использования макроопределения в
define
DDRB |= (1< Эти записи равноценны и предназначены для подстановки 1 в регистр
DDRB
в соответствующий разряд
BR3 (
разряд 3
), BR5 (
разряд 5
)
и
BR2 (
разряд 2
).
Остальные разряды регистра
DDRB
остаются без изменения. Также можно записать эту строку вот так
DDRB |= (1<<3)|(1<<5)|(1<<2);
что конечно более запутанно.
Запись 1
<<3
означает что двоичную единицу нужно сдвинуть влево на 3 позиции,
позиции справа заполняются нулями.
1
<<3
будет означать 1000 (один ноль ноль ноль) в двоичной системе. И при выполнении операции
(1<<3)|(1<<5)
мы получим 101000 в двоичной системе.
В следующей строке программы подключаем подтягивающие резисторы для кнопок. Запишем единицы в соответствующие разряды регистра
PORTD
PORTD |= (1< Эти резисторы встроены в микроконтроллер. Их можно подключить на разряды порта с условием что эти разряды определены как ввод. Резисторы подтягивают нужный вывод микроконтроллера к логической 1.
Остальные настройки производятся аналогично с использованием соответствующих регистров микроконтроллера.
Теперь рассмотрим основную часть программы которую микроконтроллер после основных настроек выполняет бесконечно. Эта часть программы заключена в бесконечный цыкл.
While(1)
{
};
Все заключенное между фигурными скобками строки программы будут выполнятся по кругу. Внутри этого бесконечного цикла происходит поразрядное разбитие десятичного числа для вывода на отдельные разряды семисегментного индикатора. После разбиения отправляем поразрядно данные по
SPI
для каждого отдельного индикатора.
Delay_ms(100);
для предотвращения ложного срабатывания от «дребезга» контактов кнопки. И второй раз опрашиваем кнопки о их нажатии и сверяем выставленным ранее флагам о нажатии. Если условия соблюдены изменяем значения выводимые на индикаторы. Затем сбрасываем флаги нажатия кнопок в 0.
После чего цикл повторяется.
В следующей - заключительной части будет рассмотрен АЦП (аналого-цифровой преобразователь) и применение всего ранее изученного на практике.
Подключение кнопки к линии порта ввода/вывода
Изучив данный материал, в котором все очень детально и подробно описано с большим количеством примеров, вы сможете легко овладеть и программировать порты ввода/вывода микроконтроллеров AVR. Пример будем рассматривать на микроконтроллере ATMega8
. Программу писать будем в Atmel Studio 6.0
. Эмулировать схему будем в Proteus 7 Professional
. Самой распространенной задачей при создании проектов для микроконтроллеров является подключение кнопок. Несмотря на простоту, эта задача имеет существенные, возможно и неочевидные особенности. Рис: Подключения кнопки с подтянутой шиной питания. Рис: Подключения кнопки с подтянутой землей. - подключения к линии порта ввода/вывода кнопки с подтянутой шиной питания:
- подключения к линии порта ввода/вывода кнопки с подтянутой землей:
// Подключаем внешние библиотеки
#include
Боротся с дребезгом тут уже не обязательно. Т.к. частота сканирования небольшая, так что даже голимая и наглухо окисленная кнопка модели ТМ2 не давала дребезга — он кончался раньше, чем наступал следующий скан. А вот что тут можно докурить, так это защиту от ложных сработок в результате наводок. Ведь стоит помехе продавить линию в момент считывания и засчитается сработка однократного нажатия. Это можно избежать сделав проверочные состояния автомата. Скажем добавив в Up счетчик итераций, чтобы в течении, скажем, двух-трех итераций подтвердить, что кнопка таки нажата и только тогда переходить в Dn.
Правда в своем проекте я несколько изменил обработку. Т.к. мне не нужны были множественные длинные нажатия, то я сделал выставление флага «Длинное нажатие» сразу же в обработчике AL и, заодно, убрал подсчет числа длинных нажатий. Что позволило повысить отзывчивость работы интерфейса прибора, где длительным нажатием осуществлялся вход в пункт меню, а комбинаций с двумя длинными нажатиями не использовались вообще.
#include “имя_файла.h”
{
тело функции
}
PORTD = 0xFF;
DDRB = 0xFF;
PORTB = 0x00;
{
тело цикла
}
//Комментарий

Способ первый - традиционный

Второй способ - с использованием диодов






Третий способ – для матричной клавиатуры


Если подключить один из контактов кнопки, например, к общему проводу («земле»), а второй к выбранной линии порта ввода/вывода микроконтроллера, который переключен в режим «Вход», то выяснится, что такой метод не работает. При нажатии кнопки линия порта микроконтроллера соединяется с землей, и программа будет считывать лог.«0» с этой линии порта ввода/вывода, но при отпущенной кнопке вывод микроконтроллера не будет соединен ни с чем, что часто и называют «висит в воздухе». В таком случае программа будет считать с вывода и лог.«0» и лог.«1» случайным образом, так как на не к чему не присоединённую линию порта ввода/вывода будут наводится наводки.
Правильное подключение предполагает, что в разомкнутом состоянии вывод микроконтроллера должен быть соединен через резистор, например с шиной питания, а в замкнутом - с землей, либо наоборот. Сопротивление резистора не должно быть слишком маленьким, чтобы ток, текущий через него при замкнутых контактах кнопки не был слишком большим. Обычно используют значения порядка 10-100 кОм.
- при отжатой кнопке равно лог.«1»;
- при нажатой кнопке равно лог.«0»;
При таком подключении состояние линии порта ввода вывода будет:
- при отжатой кнопке равно лог.«0»;
- при нажатой кнопке равно лог.«1»;

 Программирование Как прошить рацию баофенг
Программирование Как прошить рацию баофенг OK Google - голосовой помощник Андроид
OK Google - голосовой помощник Андроид Ленивая загрузка изображений
Ленивая загрузка изображений